
一、关节电机
1.无框力矩 vs 空心杯
无框力矩电机:特点是“体积小、扭矩大”,直接集成到关节中,省去了传统电机的框架结构。特斯拉Optimus的旋转关节主要采用这类电机,适合大扭矩需求(如髋部、肩部)。(下图来源于网络/百度图片)
空心杯电机:转子像空杯子一样轻,反应快、精度高,常用于灵巧手等精细操作部位。特斯拉的机械手就装了12个空心杯电机,而小米Cyber Gear的核心也是类似技术。(下图来源于网络/百度图片)
2.减速器:谐波 vs 行星
谐波减速器:精度高、体积小,但成本贵,适合高精度关节。特斯拉Optimus的14个关节都用了谐波减速器。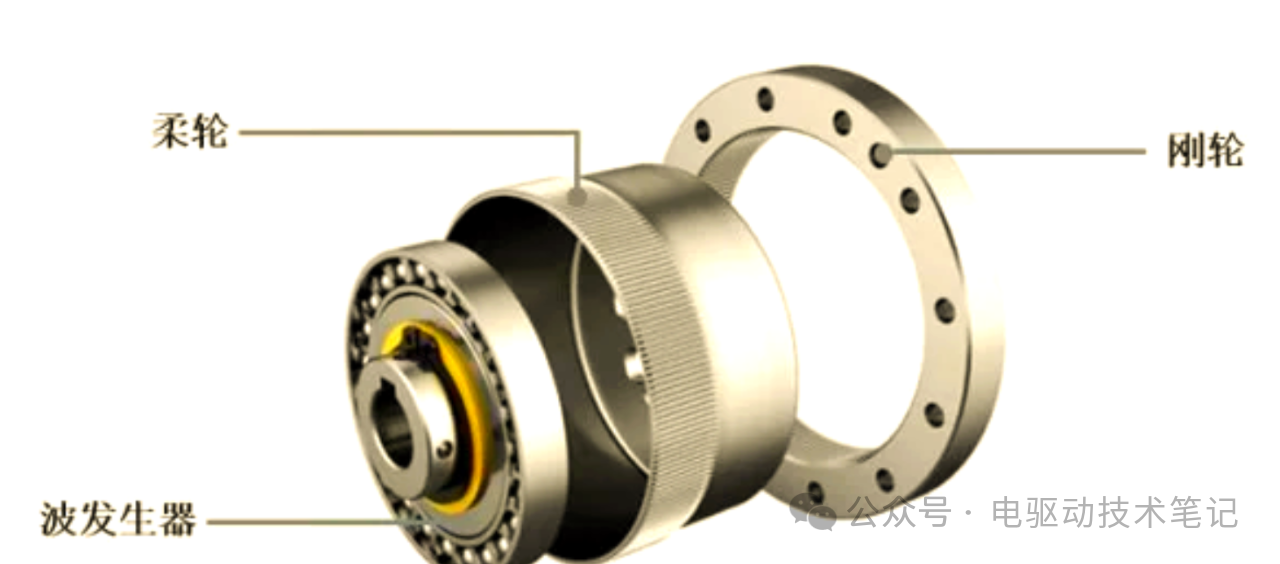
行星减速器:成本低、效率高,但体积较大,常用于对空间不敏感的关节(如腿部支撑)。
3.控制:力传感器 vs 电流环 力传感器:直接测量力度,精度高(误差±3%内),但成本高。特斯拉等高端方案倾向此技术。
电流环:通过电流估算力矩,成本低但误差较大(±10%),适合低成本机器人(如小米Cyber Gear可能采用此方案)。
4.散热与材料 电机长时间高负载运行时容易发热,特斯拉等厂商开始尝试轴向磁通电机(比传统电机扭矩密度高30%),但散热技术仍需突破。
二、技术路线
1.特斯拉Optimus
技术路线:采用“无框力矩电机+谐波减速器”组合,搭配力传感器实现精准控制。全身28个执行器中,大关节(如髋部)使用无框力矩电机,灵巧手采用空心杯电机。 优势:
高扭矩密度:适合复杂动作(如搬运重物、稳定行走)。
强算力支持:Optimus训练算力是特斯拉汽车的10倍,能通过AI优化动作流畅度。
量产潜力:2025年计划月产千台,目标成本降至1万美元。
优势:
高扭矩密度:适合复杂动作(如搬运重物、稳定行走)。
强算力支持:Optimus训练算力是特斯拉汽车的10倍,能通过AI优化动作流畅度。
量产潜力:2025年计划月产千台,目标成本降至1万美元。
2.宇树M107
技术路线:宇树未明确公开M107电机细节,但参考其H1机器人表现,推测采用“准直驱方案”(小减速比减速器+电流环控制),结合轻量化设计。
优势:
动态控制强:2025年春晚16台H1同步跳舞,展现多机协同和复杂动作能力。 成本优势:宇树G1机器人售价仅9.9万元,推测电机方案更注重性价比。
适应性好:准直驱方案耐冲击性强,适合家庭等非结构化环境。
成本优势:宇树G1机器人售价仅9.9万元,推测电机方案更注重性价比。
适应性好:准直驱方案耐冲击性强,适合家庭等非结构化环境。
3.小米Cyber Gear
技术路线:采用微型空心杯电机,结合准直驱方案,电机直径仅80.5mm,转速高达296转/分钟。类似技术用于四足机器人“铁蛋”,售价仅499元。 优势:
极致轻量化:适合手指关节等微小空间。
低成本量产:通过绕线工艺自动化,大幅降低制造成本。
消费级定位:主打极客和开发者市场,作为开发平台而非全能机器人。
优势:
极致轻量化:适合手指关节等微小空间。
低成本量产:通过绕线工艺自动化,大幅降低制造成本。
消费级定位:主打极客和开发者市场,作为开发平台而非全能机器人。
三、总结 特斯拉:追求工业级性能,适合未来工厂、家庭助手等高端场景,但成本较高。
宇树:平衡性能与价格,瞄准教育、娱乐等中端市场。
小米:以低价推动普及,通过生态链扩展应用(如智能家居联动)。
未来趋势:随着《人形机器人电驱动一体化关节接口规范》标准2025年立项,电机与减速器的兼容性将提升,国产替代加速。而轴向磁通电机、更高精度传感器的应用,可能进一步突破现有技术瓶颈。
 京公网安备11010502056287号
京公网安备11010502056287号