


整体目标是,让观众弄清这些机器人在关节配置(joint configuration)、执行器选择(actuator)、减速比(gear ratio)和驱动机构(driving mechanism)上的差异。


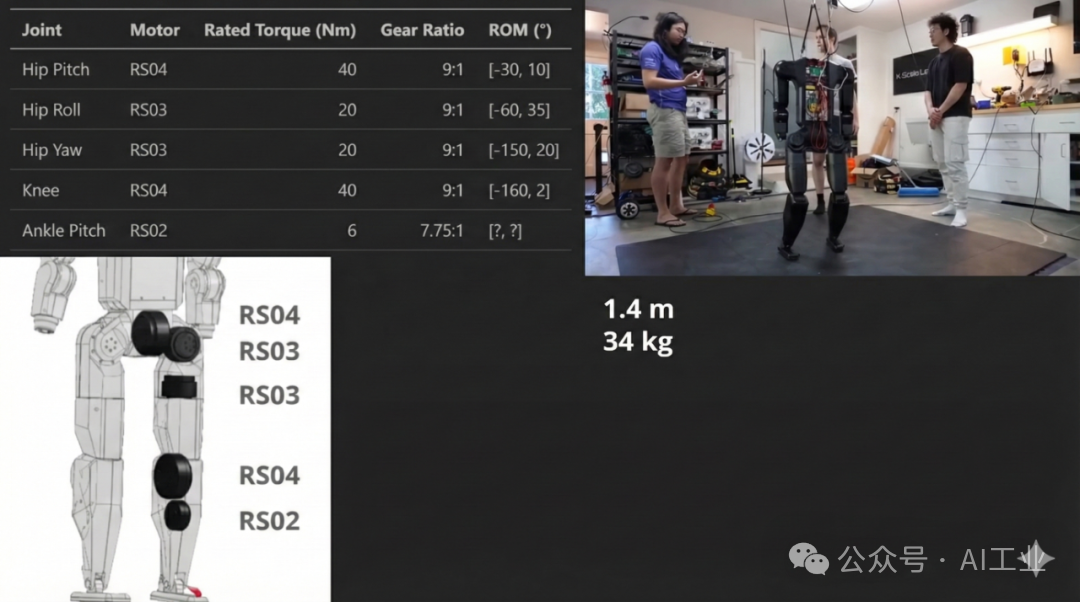
首先是Berkeley Humanoid。这是一台小型人形机器人,高度大约到成年人腰部,是典型的“迷你人形”研究平台。

它的腿部在髋关节采用hip roll、hip yaw、hip pitch三自由度,也就是roll–yaw–pitch的组合,构成主要的髋关节结构。团队为这些关节自研了执行器模组,并给出了各关节的扭矩规格与活动范围,所有髋关节的减速比统一为9:1。
往下依次是膝关节 pitch、踝关节 pitch 与踝关节 roll,一条腿就是完整的6 自由度。
.jpg)
这个设计里有两个机械细节很关键:一是他们在脚底附近直接放了一颗负责踝 roll 的电机,专门增强侧向平衡能力(后面可以对比那些干脆省略踝 roll 的方案);二是在膝和踝的驱动上采用连杆传动——一颗电机通过连杆驱动膝关节,另一颗电机通过另一套连杆驱动踝关节。这样把电机从关节轴线上“搬走”,可以显著降低腿部转动惯量、提高响应速度,并减少电机扭矩需求。
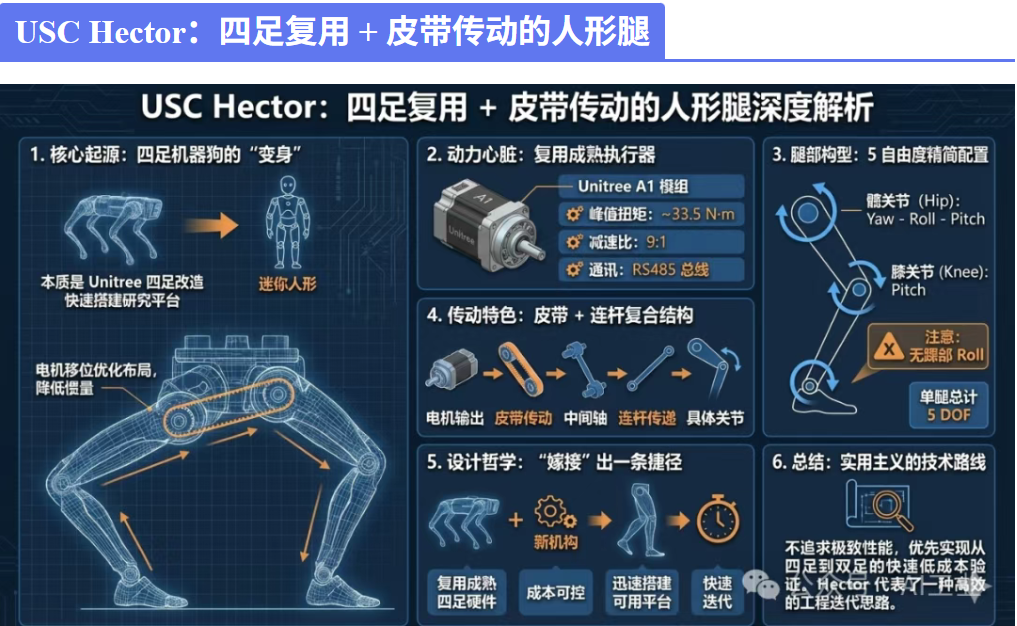
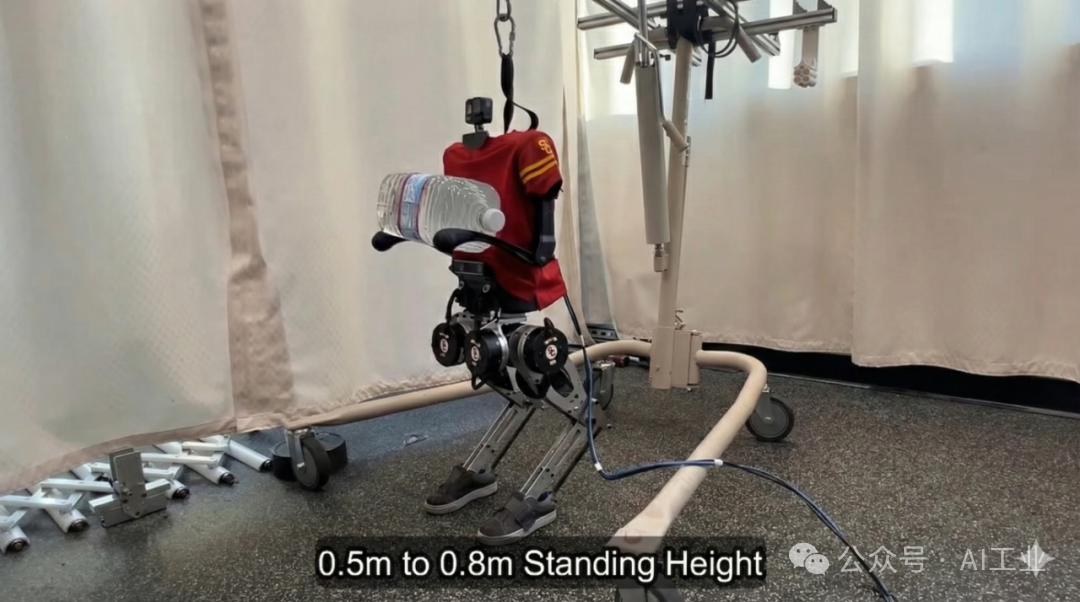
接着是USC的Hector。这同样是一台迷你人形,本质上可以理解为一台 Unitree 四足机器狗改造成的人形机器人。
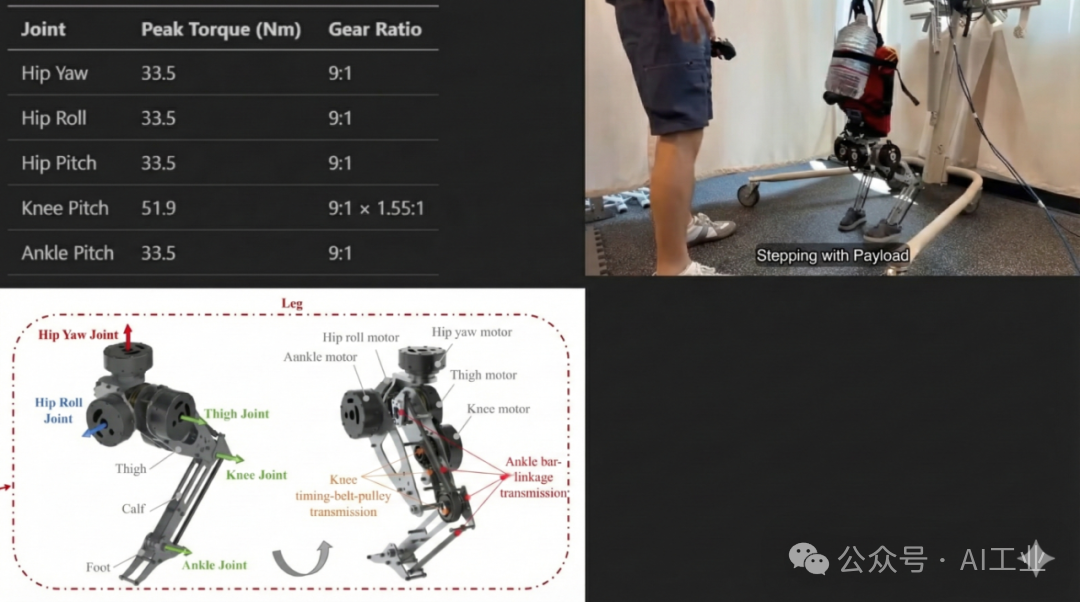
它采用Unitree 的A1电机模组,通过RS485 总线通信。官方只给出了峰值扭矩(peak torque),没有额定扭矩数据,峰值大约在33.5 N·m,减速比同样是 9:1。髋关节的配置是yaw–roll–pitch,往下是膝 pitch 和踝 pitch,没有踝 roll,所以每条腿是5 自由度。
在传动形式上,Hector和 Berkeley 明显不同:它在腿部大量使用皮带传动 + 连杆结构,用皮带把电机输出传到中间轴,再通过连杆把运动传递到具体关节。
这是一条典型的路线:复用成熟四足执行器,用新机构“嫁接”出一条人形腿,可以在成本可控的前提下,迅速搭建出可用的人形平台。


第三个是MIT的人形机器人。它在尺寸上和 Hector 非常接近,同样是小型科研平台,髋部也采用yaw–roll–pitch配置。
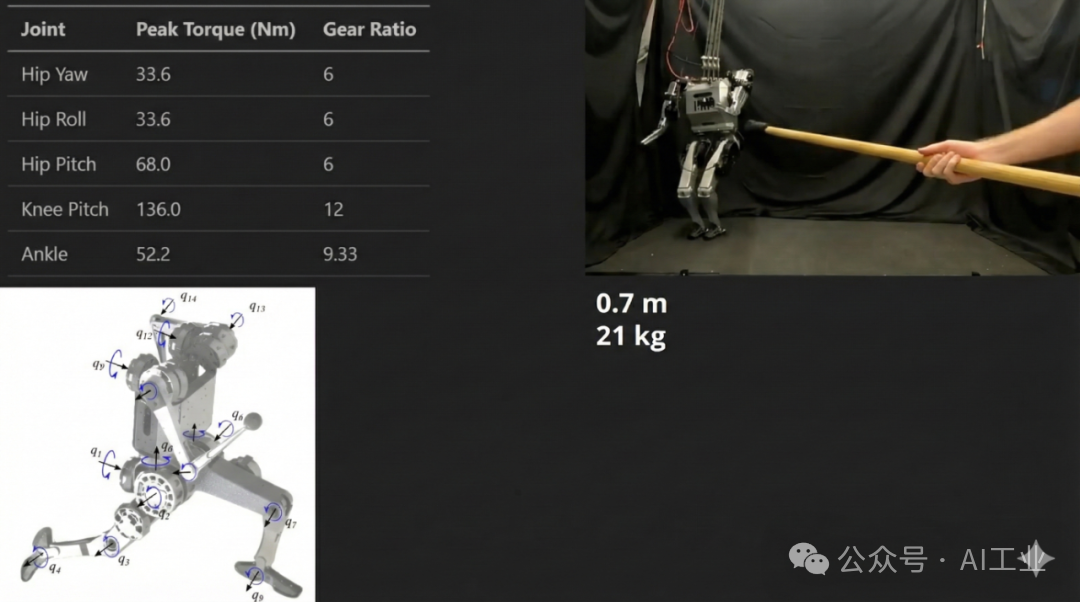
MIT 团队为它自研了一整套执行器,外形上看和前面的研究平台类似,但指标明显更“凶猛”:例如髋 pitch 峰值扭矩约 68 N·m,膝 pitch 峰值约 136 N·m,踝关节约 52.2 N·m。整体思路很明确,就是在小体积下尽可能堆高扭矩,为高动态实验预留裕量。
视频也提醒,可以去看他们的论文,里面对这些执行器的结构设计和优化做了详细展开。
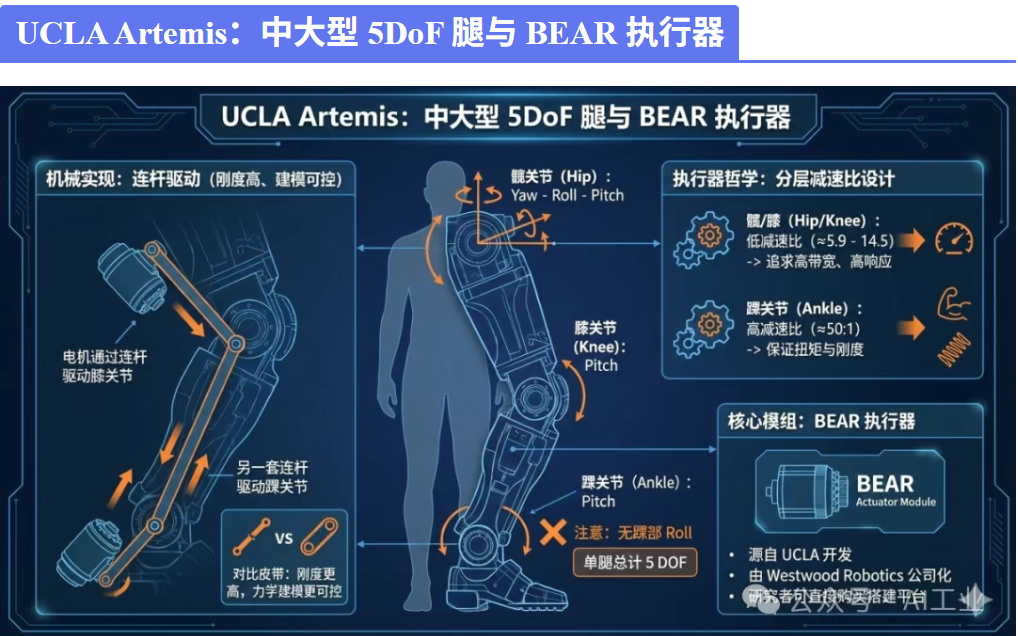

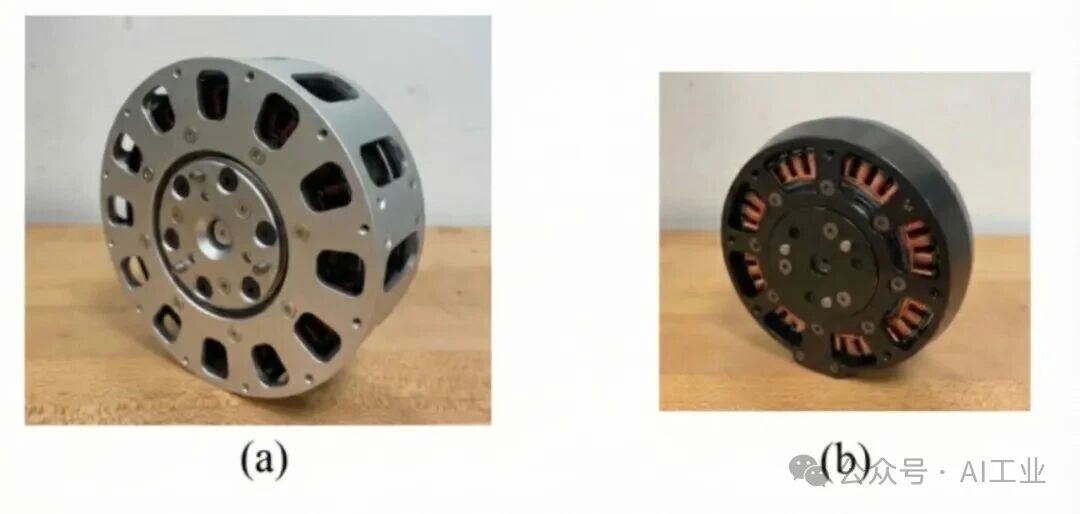
第四个是UCLA Artemis。Artemis 是一台中等偏大的研究型人形机器人,尺寸介于中型和全尺寸之间,更接近未来实用场景。它的腿部采用 hip yaw–roll–pitch + 膝 pitch + 踝 pitch 的配置,每条腿总共有5个自由度,相比 Berkeley 少了一个踝 roll。
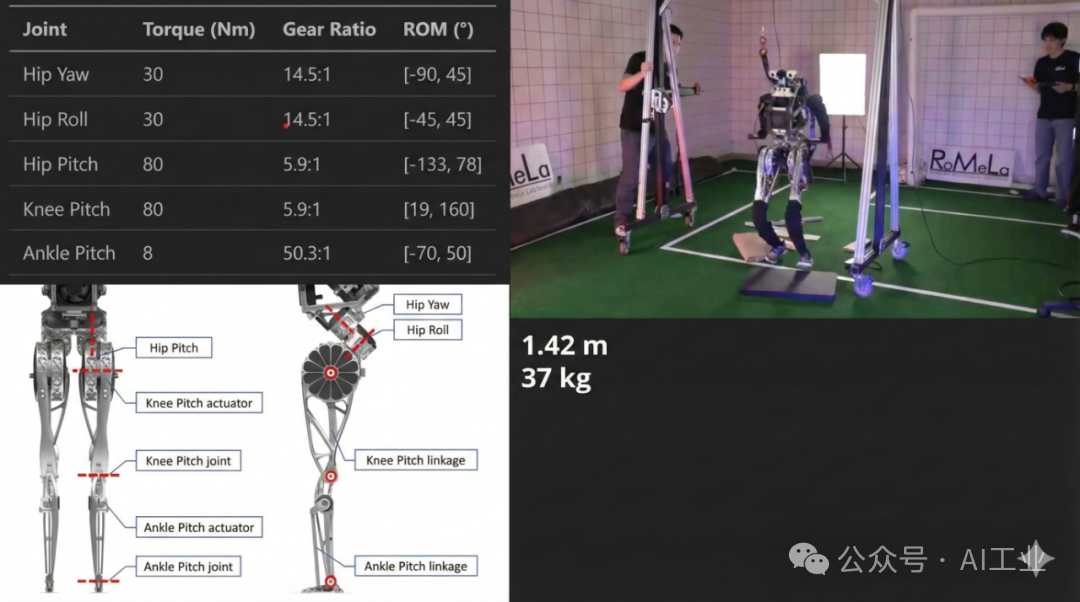
UCLA 团队为它开发了自研的定制执行器,减速比设计很有层次感:很多关节的减速比都比较低,髋、膝多在 ≈5.9 左右,部分可到 14.5,而踝 pitch 的减速比明显更高,可达 ≈50:1。这体现的是一种很典型的设计哲学:大部分动力与功率输出集中在髋、膝,追求高带宽、高响应;踝关节重点是支撑与地面交互,因此用更高减速比来保证扭矩与刚度。
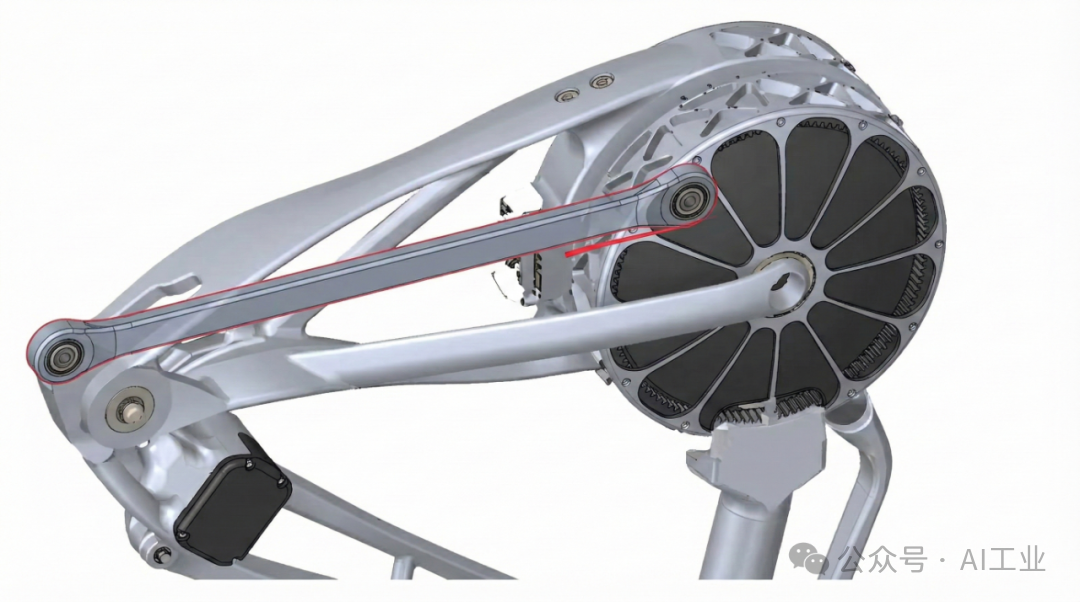
在机械实现上,Artemis 的膝和踝同样采用连杆驱动——一颗电机通过连杆驱动膝关节,另一套连杆驱动踝关节,这种连杆结构刚度较高,力学建模也比皮带更可控。它所使用的一类执行器后来演化成了BEAR执行器,最初在 UCLA 开发,之后由Westwood Robotics公司化,研究者可以直接购买类似模组搭建自己的机器人平台。
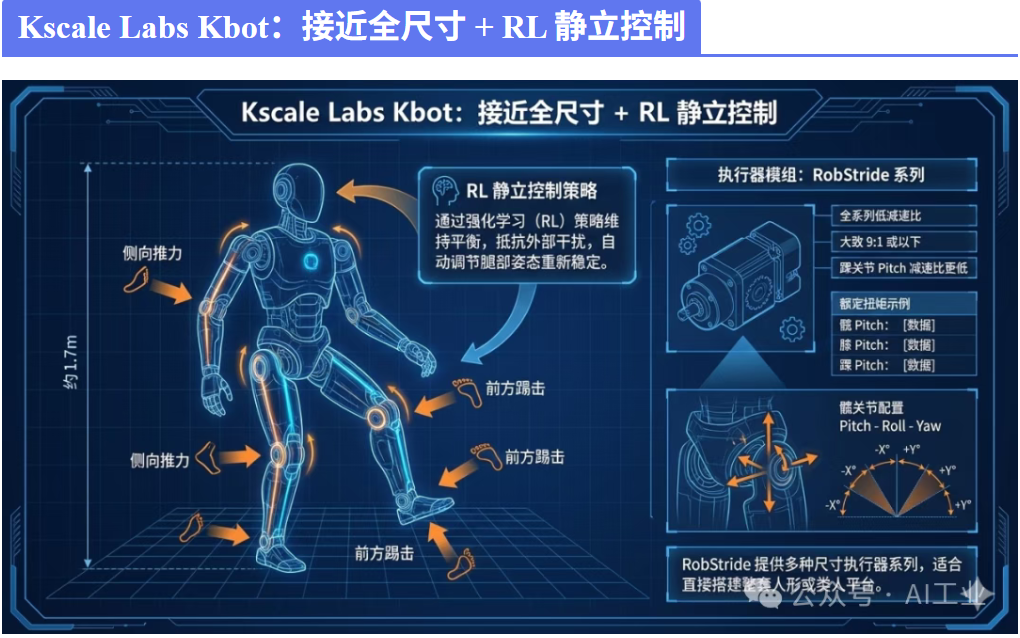

再往后是Kscale Labs 的 Kbot。Kbot 是一台接近全尺寸的人形机器人,视频中展示的是一个基于强化学习(RL)的静立控制策略:机器人站在原地,通过 RL 策略维持平衡,人从各个方向刻意踢、推,它会通过腿部调节重新稳定。
Kbot 使用的是RobStride的执行器模组,视频给出了各个关节的额定扭矩,并指出这些关节的减速比都很低,大致在 9:1 或以下,踝 pitch 的减速比甚至更低。髋关节采用pitch–roll–yaw配置,并给出了各自由度的转角范围。

RobStride 提供多种尺寸的执行器系列,非常适合拿来直接搭一整套人形机器人或类人平台。


Unitree G1则是一台面向教育与研究的小型人形机器人。最新演示里,它在被从各个方向连续踢打之后,可以从各种姿态迅速站起并恢复平衡,视频作者对这点评价很高。
G1 的腿部是完整6自由度配置:髋关节为pitch–roll–yaw,膝关节为pitch,踝关节为pitch + roll。相关的扭矩和减速比并没有直接写在产品参数中,但可以从官方的URDF文件和 GitHub 仓库里解析出来。
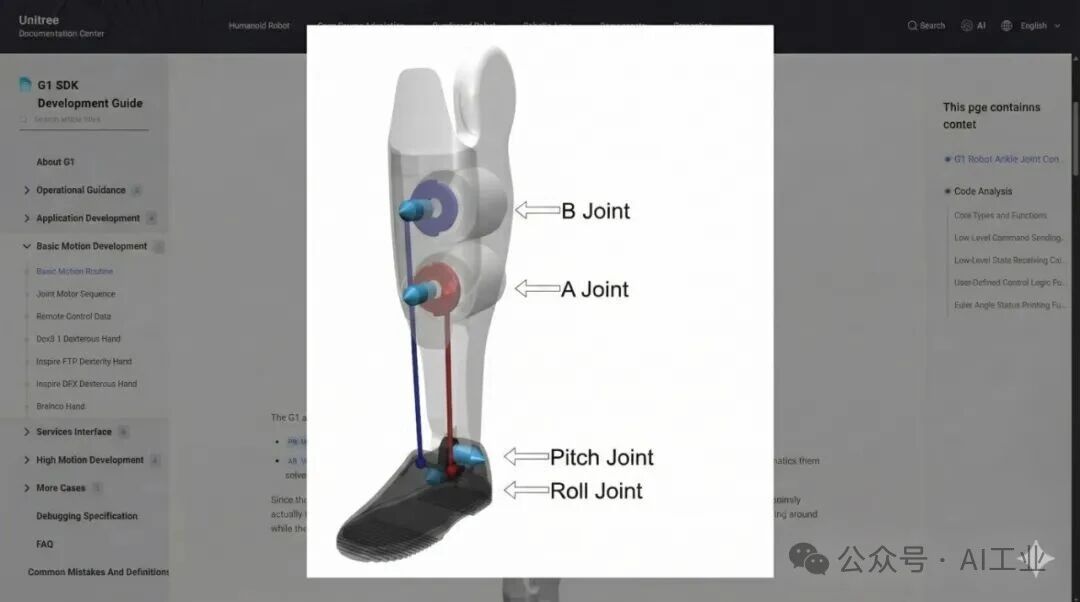
结构上,它最大的亮点是“两电机 + 两连杆 + 万向节踝”:在膝关节下方布置了两颗电机,而不是像前面那些设计一样尽量把电机往髋部挪;这两颗电机通过两条连杆连接足部末端,驱动底部的两自由度万向节踝,脚底和两条连杆的连接形成相交的 pitch 与 roll 轴,构成一个具有两个自由度的万向节关节。

这样一来,足底可以在前后(pitch)和左右(roll)两个方向同时灵活摆动,对于单脚站立尤其重要:当机器人站在一只脚上,通过踝 roll 让足底左右“滚动”,就可以微调重心位置,维持平衡。仿真画面清楚地展示了万向节踝在驱动下的足部运动轨迹,从工程角度看,“万向节 + 双电机连杆”是实现两自由度踝关节的一个非常实用的方案。
.png)

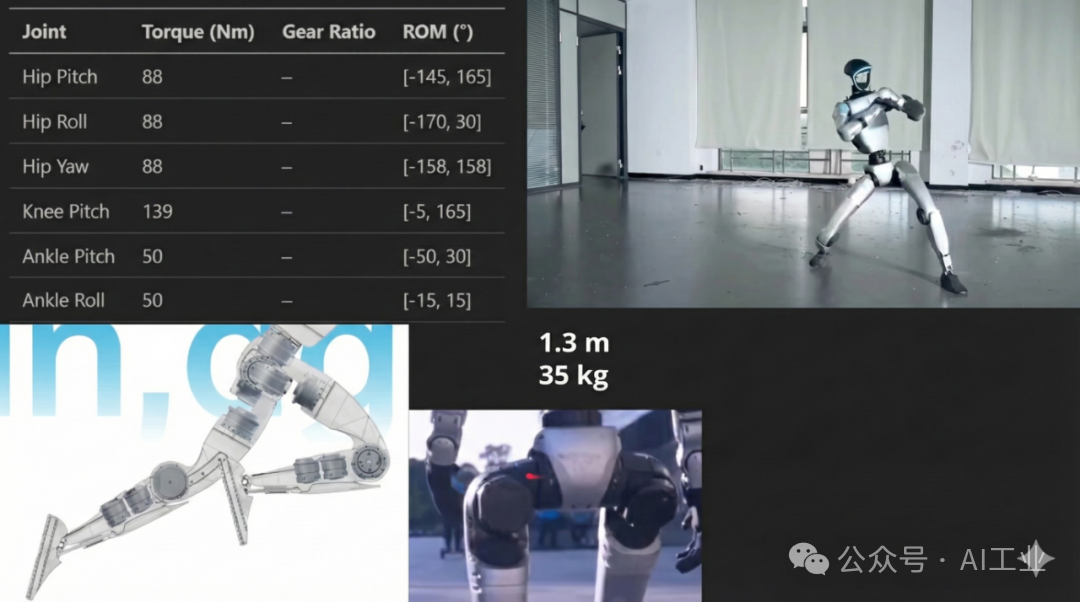
在讲完 Unitree G1 的万向节踝之后,视频接着分析Tesla Optimus(Gen 2)。这台机器人最有标志性的特征之一,是在腿部大量使用线性执行器(linear actuator)。早期如 Boston Dynamics Atlas 第一代,人形机器人广泛采用液压驱动;后来大家逐步转向电机 + 减速器的电磁执行器(无刷电机);特斯拉则在此基础上,又进一步在大腿和足部集成了自研的线性执行器,这一点在专利中有详细描述。


Optimus 的腿部关节配置是髋关节 roll–yaw–pitch,膝关节 pitch,踝关节 pitch + roll,同样是一条6自由度腿。专利里给出了不同执行器的扭矩和推力指标:上排是“常规旋转执行器”,下排是线性执行器,其中一些关节扭矩可达180 N·m,线性执行器的推力可达8,000 N,显然是为了应对跑步、跳跃时数倍体重的冲击载荷。
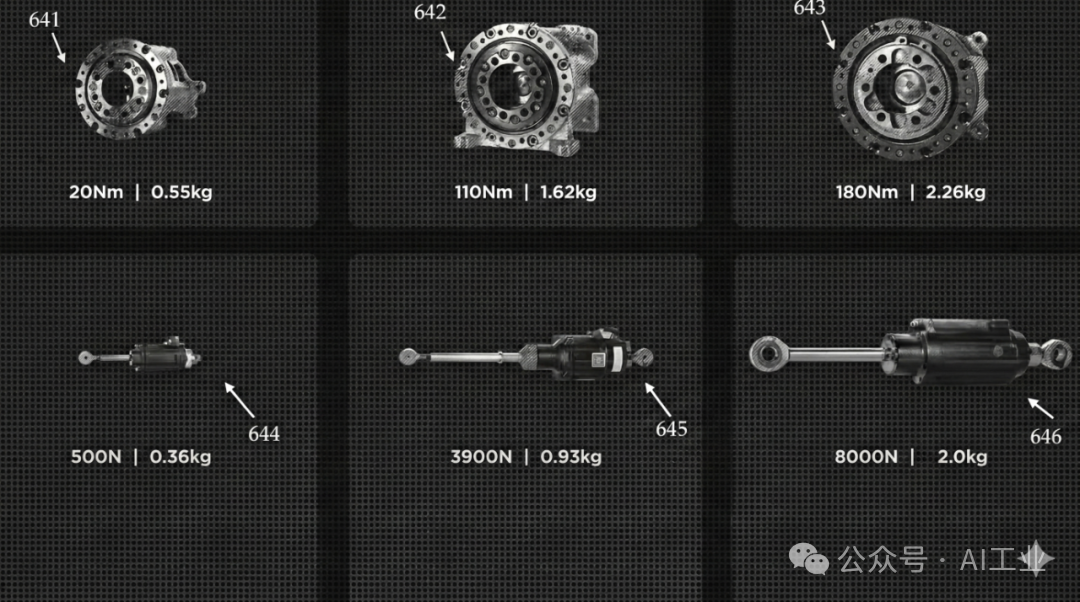
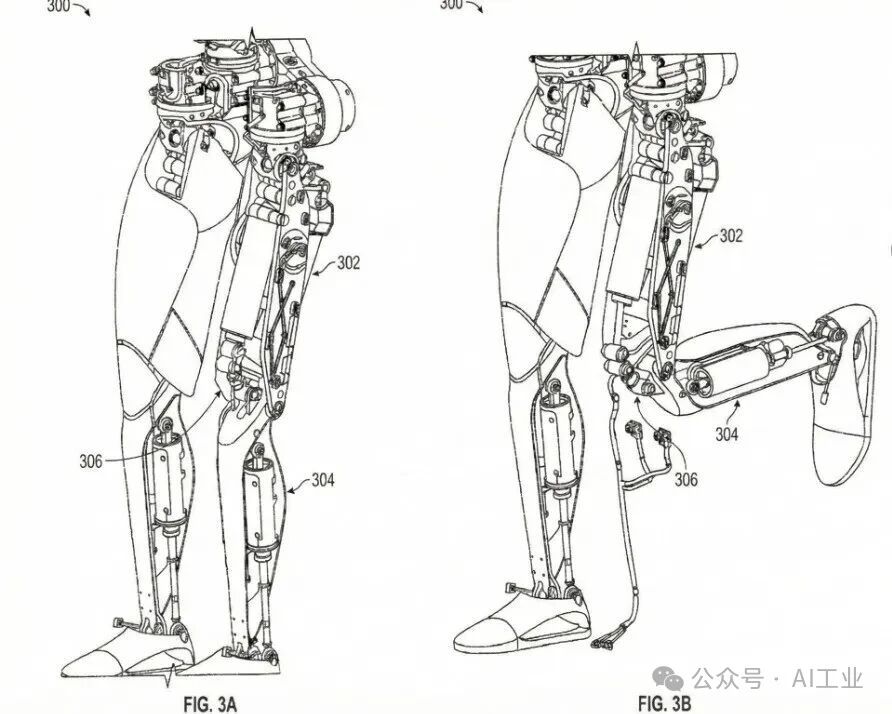
从专利图可以看到,膝关节和髋关节附近布置了带滚轮的线性执行器,通过滚轮在轨迹上滑动来实现关节弯曲;在足部,同样布置了两只线性执行器,驱动一个两自由度的“万向节踝”结构,在功能上与 Unitree G1 的双自由度踝类似,但驱动元件从“旋转电机 + 连杆”变成了“线性执行器 + 导轨/滚轮”。此外,踝 pitch 也通过嵌入式线性执行器实现驱动,整体上体现出特斯拉在腿部大范围采用“线性伺服 + 导轨/滚轮”的一体化机械思路。
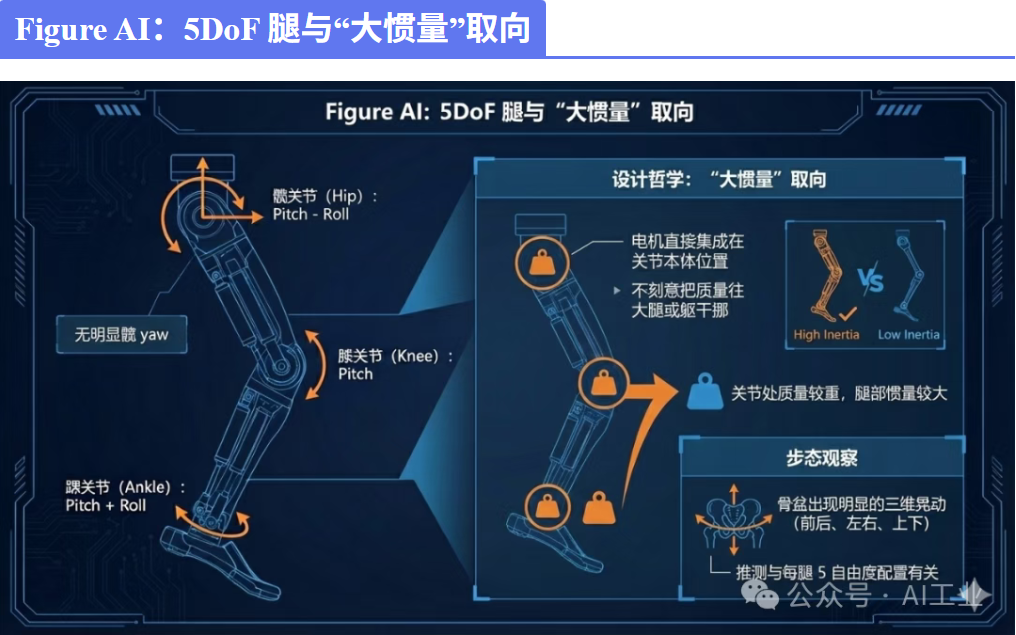

Figure AI 的人形机器人,视频则是从步态出发来分析。作者观察到,Figure 在行走时,髋部会出现比较明显的前后、左右以及上下方向的摆动与倾斜,看起来像是骨盆在三维空间里“晃动”。他推测,这和 Figure每条腿只有5个自由度有关。

根据公开画面,他认为 Figure 的配置大致是:髋关节只有 pitch 和 roll,没有明显的髋 yaw(画面中可以看到一个执行器负责髋 pitch,另一个负责髋 roll);膝关节为直接在膝部集成执行器的 pitch;踝 pitch 的执行器埋在小腿内部;踝 roll 则直接集成在脚部。
整体上,Figure 的路线是把电机几乎都放在关节本体位置,不刻意把质量往大腿或躯干挪,也就是说关节处的质量较重,腿部惯量较大,对“减小惯量、往上游挪质量”这件事并不敏感,这一点和前面几台以轻量化、低惯量为目标的研究机器人形成鲜明对比。
腿部自由度与关节配置的整体对比
在对这些机器人逐一分析之后,视频做了一个简要的关节配置小结。从自由度角度看,可以先区分六自由度腿和五自由度腿。
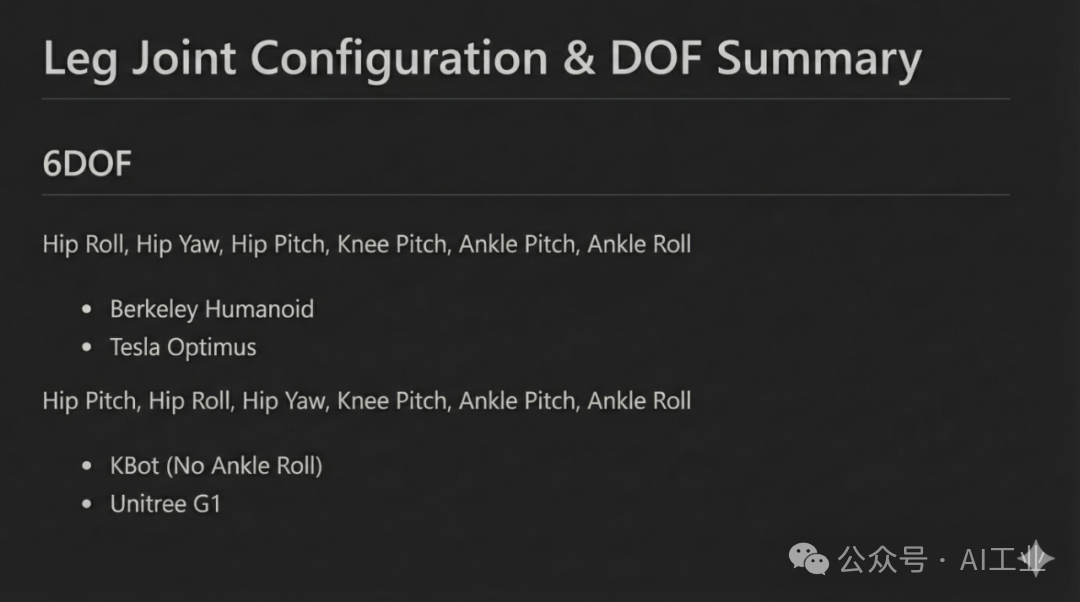
六自由度腿的典型配置是:髋部 3 自由度 + 膝 pitch + 踝 pitch + 踝 roll。其中,Berkeley Humanoid 和 Tesla Optimus采用的是髋关节 roll–yaw–pitch(RYP)顺序;Kscale Labs Kbot 和Unitree G1 则采用pitch–roll–yaw(PRY)顺序。不过 Kbot 省略了踝 roll,在侧向稳定性控制上会有所削弱,作者推测这大概是为了降低成本和结构复杂度。
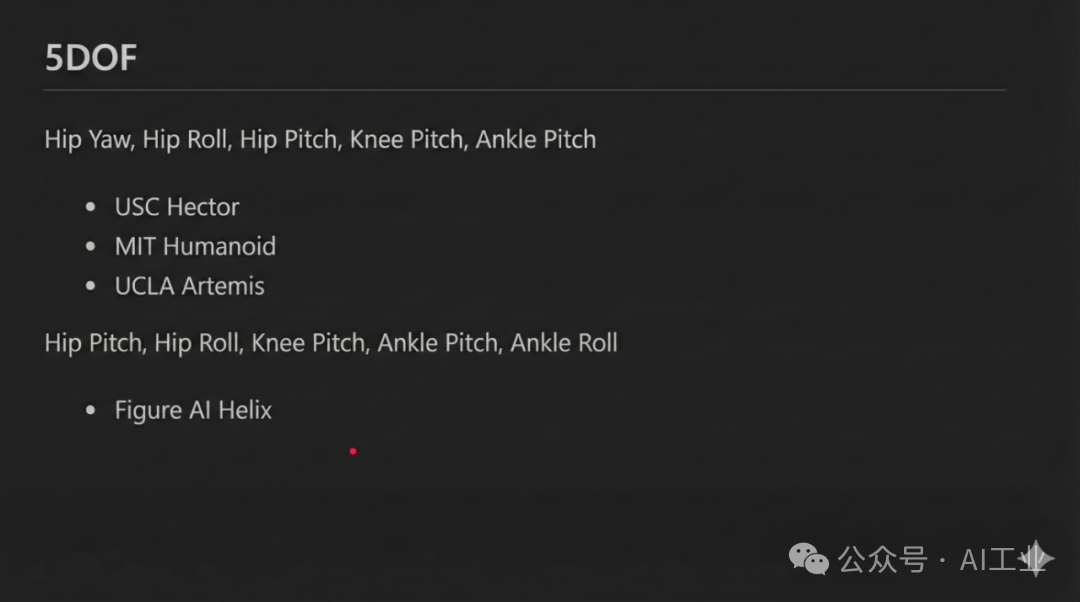
五自由度腿方面,USC Hector、MIT Humanoid 和 UCLA Artemis的共同特点是:髋关节采用 yaw–roll–pitch 三轴,膝与踝只有 pitch,也就是把踝 roll 这一自由度省掉;而 Figure AI 则是髋部采用 pitch–roll,直接省略髋 yaw,再加上膝 pitch、踝 pitch 和踝 roll,凑成 5 个自由度。作者特别说明,这些都是基于公开画面和资料的推断,如有遗漏执行器,也欢迎指正。
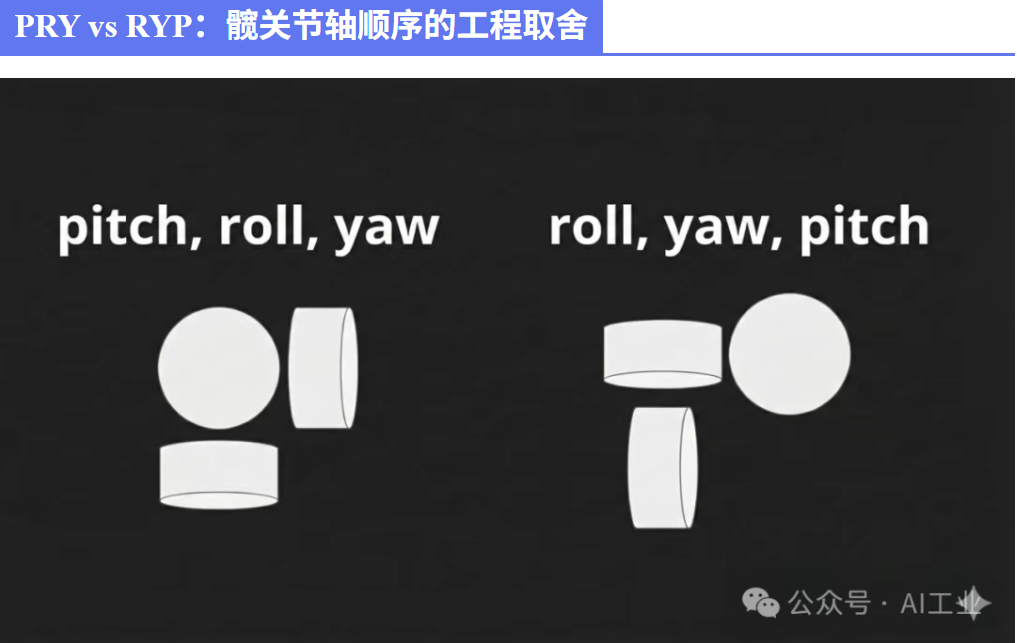
从更抽象的层面看,视频总结出两套主流的髋关节轴顺序:一种是pitch–roll–yaw(PRY),典型代表是Unitree G1、Kbot;另一种是 roll–yaw–pitch(RYP),代表是 Berkeley Humanoid、Tesla Optimus。在作者看来,这两种方案在功能自由度上几乎是完全等价的,因为髋关节本质上就是一个球窝关节,不管是 PRY 还是 RYP,最终都要实现三个相交的旋转轴。真正的差别主要体现在两个方面:一是结构封装(packaging),二是各轴的力矩与载荷分配。
在结构封装上,如果 pitch 在最外层(PRY),左右两条腿的 pitch 执行器可以像“夹心”一样,紧贴在身体中心线两侧,腰部/髋部横向布局可以做得很紧凑;做 pitch 旋转时,主要是细长的连杆在转动,对周围结构的干涉、预留间隙要求相对较低。而如果roll 在最外层(RYP),做 roll 旋转时,整块执行器以及后面一长段结构都要一起转出,需要预留一大块“空腔空间”避免干涉,对外壳造型和内部布局约束更大,通常更难做到极致紧凑的封装。
在力矩与载荷传递上,关键点在于pitch 执行器是在关节链条的“第一轴”还是“最后一轴”。如果像 PRY 那样,把 pitch 放在最前面,它必须承受后面整条腿的全部重量和惯量,因此对这个关节的扭矩要求会显著增大;如果像 Tesla 的 RYP 那样,把 pitch 放在最后,它只需承担更靠远端那一小段结构的重量与惯量,扭矩需求相对更低,执行器尺寸与成本可以更友好。
综合来看,作者的结论是:PRY和RYP 在自由度层面完全等价,真正的差别主要在机械设计上的封装方式、结构干涉余量,以及各轴的力矩需求分布。设计者更在意哪一侧,就会倾向哪一种配置。视频最后,他也顺带预告,后续会推出一系列“从零设计人形机器人腿部”的深度内容,把这些从专利、论文图里看到的结构,一步步落地成真实硬件。
 京公网安备11010502056287号
京公网安备11010502056287号